I. Обзор системы
1. Предыстория проекта
В последние годы незаконная перевозка грузовых автомобилей по автомагистралям стала серьёзной проблемой, угрожающей безопасности дорожного движения в стране. Это приводит к перегрузке автомагистралей и мостов, значительно сокращая срок их службы; одновременно с этим значительно снижается запас прочности транспортных средств, что постоянно приводит к дорожно-транспортным происшествиям, а также легко приводит к заторам на дорогах и загрязнению окружающей среды.
Правительства всех уровней по всей стране постоянно наращивают усилия по контролю за перегрузкой транспортных средств на дорогах и добились важных поэтапных результатов. Однако из-за сложных социальных и экономических факторов ситуация с обнаружением перегрузок на национальном уровне по-прежнему остается очень серьезной, и скрытые опасности повторного возникновения этой проблемы не устранены; консолидация результатов управления и постоянное содействие работе по обнаружению перегрузок по-прежнему находятся под большим давлением. Таким образом, управление перегрузкой транспортных средств является долгосрочной и ежедневной работой, которую необходимо продолжать. Крайне важно включить управление перегрузкой в долгосрочный механизм. Оно также играет правовую сдерживающую роль в отношении перегруженных транспортных средств и может также расширить свои функции, чтобы превратить его в дорожную инспекцию, пресекать менталитет случайности незаконных транспортных операций и своевременно контролировать и пресекать различные незаконные транспортные операции, включая перегрузку.
2. Введение в систему взвешивания
Принцип взвешивания статических автомобильных весов заключается в размещении всех транспортных средств на платформе для полного взвешивания. Они обладают высокой точностью взвешивания и соответствуют четким национальным стандартам. Однако обычные автомобильные весы могут измерять только вес всего транспортного средства, но не нагрузку на ось. Они позволяют определить, перегружен ли весь автомобиль, но не перегружена ли ось. Они не отвечают требованиям дорожного управления по управлению перегрузкой.
Этот план объединяет многолетний опыт нашей компании в разработке и производстве оборудования для контроля перегрузки и его фактическое применение в различных регионах страны, тщательно изучает использование различных видов оборудования для контроля перегрузки на рынке и всесторонне учитывает специфические потребности департаментов дорожного хозяйства в управлении перегрузкой транспортных средств. В нём используются передовые технологии и уникальные конструкторские решения для разработки динамической высокоточной системы определения веса транспортного средства и типа оси. Система способна взвешивать как осевую нагрузку, так и общую нагрузку, а также различать тип оси. Точность определения веса оси также может быть значительно повышена.
2. Состав системы контроля перегрузки и превышения лимита
1. Особенности системы
Он может взвешивать транспортные средства, проезжающие на низкой скорости, и автоматически определять, перегружен ли вес транспортного средства или нагрузка на ось;
Он может определить количество осей, группу осей, нагрузку на ось и массу транспортного средства;
Он может формировать полную информацию о взвешивании транспортного средства, включая тип оси, нагрузку на ось, группу осей и общий вес;
Он может передавать данные взвешивания на компьютер через интерфейс данных;
Основная часть системы состоит из надежного и проверенного оборудования, имеющего модульную конструкцию, легкого в обслуживании и расширении, что обеспечивает высокую надежность системы.
Системное программное обеспечение является зрелым, высоконадежным, данные полные и эффективные, и ими можно свободно обмениваться, что существенно повышает эффективность работы и в максимальной степени устраняет различные лазейки в управлении.
2. Системный процесс
Грузовик въезжает на линию взвешивания станции перегрузки, и система распознавания номерных знаков идентифицирует номерной знак;
Идентификатор шины (оси) различает количество осей, и система взвешивания транспортного средства начинает взвешивание, определяет группу осей и рассчитывает нагрузку на ось.
Когда все транспортные средства проходят через разделитель транспортных средств и поступают на весовую платформу, а весы находятся в относительно уравновешенном состоянии, регистрируется общий вес транспортного средства и определяется нагрузка на ось.
Система взвешивания передает данные о весе (номерной знак, количество осей, нагрузку на ось, общую массу автомобиля и т. д.) в компьютер обнаружения. Компьютер определяет, превышен ли допустимый предел, и отображает на экране данные, такие как масса автомобиля, превышение допустимого предела и степень превышения.
После того, как транспортное средство завершит соответствующие операции, персонал, сопровождающий транспортное средство, разрешает транспортным средствам, не превышающим установленный лимит, покинуть зону обнаружения в соответствии с информацией на экране дисплея, направляет транспортные средства, превышающие установленный лимит, на территорию станции для обработки, распечатывает форму осмотра транспортного средства, превышающего установленный лимит, и выполняет соответствующие операции по начислению платы;
3. Состав и план компоновки системы
3.1 Состав системы
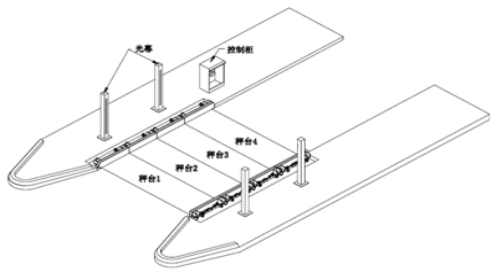
Система контроля превышения и перегрузки состоит из четырехстоечных динамических осевых весов ZDG, контрольного прибора, инфракрасного сепаратора транспортных средств, идентификатора осей колес весовой платформы, шкафа управления (дополнительное оборудование: система распознавания номерных знаков, система отображения на большом светодиодном экране, система голосовых подсказок, система управления транспортным средством, промышленный компьютер, принтер для печати билетов, источник бесперебойного питания ИБП, программное обеспечение системы обнаружения превышения и перегрузки, система мониторинга) и других аксессуаров и кабелей.
3.2 Схема компоновки системы, как показано на рисунке:
Рабочий процесс:
1) Транспортные средства въезжают на полосу движения последовательно, соблюдая безопасную дистанцию, что приводит в действие инфракрасный разделитель транспортных средств;
2) Каждая ось транспортного средства проходит через многоплоскостную весовую платформу;
3) Контроллер дисплея обрабатывает сигнал взвешивания, полученный от датчика весовой платформы и сигнал датчика колеса, разделяет ось в соответствии с логическими условиями и эффективно обрабатывает особые ситуации;
4) Задняя часть транспортного средства покидает многоплоскостную весовую платформу и инфракрасный сепаратор транспортного средства;
5) Контроллер дисплея комплексно оценивает сигнал окончания движения транспортного средства на основе сигнала окклюзии, обнаруженного инфракрасным сепаратором транспортного средства, и сигнала взвешивания, полученного датчиком взвешивания;
6) Контроллер дисплея обрабатывает сигнал взвешивания, полученный при проезде вышеуказанного транспортного средства через весовую платформу;
7) Контроллер дисплея формирует полную информацию о взвешивании всего транспортного средства, причем полная информация о взвешивании включает в себя скорость транспортного средства, тип оси, нагрузку на ось, нагрузку на группу осей, общую массу и т. д.;
8) Завершите процесс взвешивания одного транспортного средства и дождитесь взвешивания следующего транспортного средства.
9) В течение всего рабочего процесса система автоматически обрабатывает различные особые ситуации, такие как полный въезд и полный выезд, повторный въезд и выезд, а также длительное нахождение на весовой платформе;
Система может автоматически и эффективно обрабатывать следующую ситуацию транспортного средства, а последующее взвешивание транспортного средства не влияет на точность данных.

Время публикации: 20 февраля 2025 г.